
КИНЕМАТИЧКИ СИНЏИРИ
Повеќе
поврзани делови од телото или целото тело претставуваат
кинематички
синџир (низа) во која една негова алка споена со друга се нарекува
кинематички пар или
биомеханичка моторна
единица. Оваа моторна единица во локомоторниот систем е
дефинирана со две коски односно два лоста со заеднички зглоб поврзани со
мускулна група која има определена функција. Според тоа, кинематичкиот
синџир претставува множество од биомеханички моторни единици меѓусебно
поврзани во кои мускулното дејство од еден непосредно или посредно се
пренесува на другите делови од телото. Кинематичките синџири можат да
бидат:
1. Отворени кинематички синџир
2. Полуотворени кинематички
синџири
3. Затворени кинематички синџири
1. Кинематички синџири ако се слободни од двете страни претставуваат отворени. Тие се присутни кога телото е во безпотпорна фаза (слика 1). Манифестирањето на мускулното дејство кај спортските движења во фазата на лет (прескоци, доскоци, скокови во вода) е различна во однос на движењата кои се изведуваат во услови на потпор. Мускулите кај отворениот кинематички синџир дејствуваат подеднакво на централните и периферните мускулни споеви, така што деловите од телото меѓусебно се привлекуваат или оддалечуваат сразмерно со нивните маси. Според тоа, и контракцијата особено концентричната се дефинира дека е без потпор, односно во примерот (слика 1б) флексијата во зглобот на колкот е резултат на концентрична контракција на флексорите без потпор. За да се врати телото во испружена положба додека е во лет, тогаш треба да се активираат антагонистите, односно екстензорите во зглобот на колкот со концентрична контракција и поворно без потпор (слика 1а).
2. Полуотворени кинематички синџири се присутни кај положби и движења на телото кога едниот крај е фиксиран а другиот слободен. На слика 2 главата и вратот претставуваат

полуотворен кинематички синџир додека сите други делови се во затворен кинематички синџир. Особено важно е да се истакне дека мускулното дејство во однос на земјината тежа во полуотворениот и затворениот кинематички синџир е различно. За да се oдржат главата и вратот во хоризонтална положба неопхопдно е дејство на мускулите од надворешната (горна) страна, односно со изометриска контракција на екстензорите во зглобот на главата и изометриска контракција на екстензорите во вратниот дел од рбетниот столб, а за да се одржат другите делови од телото во активна положба, тогаш неопходно е дејство на мускулите од внатрешната (долната) страна. Што значи принципот на мускулното активирање за одржување на положби во полуотворен кинематички синџир е обратен.
Преносното механичко дејство од една биомеханичка моторна единица на другите
во полуотворените кинематички синџири присутно е во сите сложени движења, а не
ретко и кај елементарните движења изведени во еден зглоб и една рамнина.
Типичен пример за преносното дејство од едни на други делови од телото
прикажан е на слика 3, каде мускулите вдишувачи

со подигнувањето на градниот кош (вдишување инспириум) предизвикуваат во овој полуотворен кинематички синџир подигнување на стапалата кои не се во директна врска со градниот кош. За да се одржат нозете подигнати во лежечка положба на грб, неопходна е изометриска контракција на флексорите во зглобот на колкот, а за да се фиксира карлицата, неопходна е изометриска контракција на мускулите на мевот, односно флексорите на слабинскиот дел од рбетниот столб. Подигнувањето на градниот кош врши повлекување на централните мускулини споеви, а со тоа и повлекување на периферните бидејќи стомачните мускули се во изометриска контракција. Заради тоа, карлицата ротира кон градниот кош и го повлeкува централниот мускулен спој заради изометриска контракција овозможуваат подигнување на нозете односно стапалата. Со издишување (експириум) градниот кош се спушта и заради истото преносно дејство во обратна насока нозете се спуштаат, односно се враќаат во почетна положба.
Преносното дејство кај полуотворените кинематички синџири во мускулната координација има рационална појава, каде активноста на двозглобните мускули потпомогната со еднозглобни мускули овозможува подобри резултати. На слика 4 е прикажано позитивното дејство на делтиодниот еднозглобен мускул (m. deltoideus) врз триглавиот двозглобен мускул на надлактицата (m. tricheps brachii). Со абдукција во зглбот рамото се врши истегнување (издолжување) на екстензорот во зглобот на лакотот (m. tricheps brachii, caput longum) со што се подобруваат неговите почетни услови за дејствување. На слика 4 тоа е прикажано со поголемиот агол (α1) меѓу надлактицата и подлактицата по дејството на абдукторите (m. deltoideus) во зглобот на рамото. Оваа рационалност во преносното дејство наведена во примерот, евидентна е кај фрлањето ѓуле, каде почетната положба на раката со која се исфрла ѓулето е во положба на абдукција во зглобот на рамото.

3. Затворените кинематички синџири се формираат кога двата краја од деловите на телото се фиксирани. На слика 2 тоа се рацете градниот и слабинскиот дел од рбетниот столб, карлицата и нозете. Во затворениот кинематички синџир мускулното дејство се манифестира од внатрешната (долната) страна. Во овој пример за да се спречи спуштањето на карлицата, треба со изометриска контракција да дејствуваат: флексорите во зглобот на шаката, екстензорите во зглобот на лакотот, ретрофлексорите во зглобот на рамото, флексорите во градниот и слабинскиот дел од рбетниот столб, флексорите во зглобот на колкот, екстензорите во зглобот на коленото и дорзалните флексори во горниот скочен зглоб.
Преносното
дејство на затворените кинематички синџири, исто така е присутно и е во
функција на рационализација на мускулното дејство.
На слика 5
се гледа дека со подигнување на петите вој седечка положба покрај плантарната
флексија во горниот скочен зглоб се врши флексија и во зглобот на коленото и
во зглобот на колкот, па дури и флексија во зглобот на лакотот, ако рацете се
поставени на коленото. Сите овие движења во наведените зглобови се последица
само на концентричната контракција на плантарните флексори во горниот скочен
зглоб, што значи другите промени се заради преносното дејство во затворениот
кинематички синџир.

Особено интересен пример за спортската практика е дејството на двозглобните мускули на задната страна на бутот во услови на затворен кинематички синџир (слика 6). Овие двозглобни мускули во зглобот на колкот се типични екстензори, а во зглобот на коленото флексори. Меѓутоа, кога тие дејствуваат во затворен кинематички синџир каде карлицата и стапалото се фиксирани (возење велосипед, веслање во спортски чамец), тогаш двозглобните мускули на задната страна на бутот ја менуваат финкцијата, така што од типични флексори во зглобот на коленото во овие услови тие се во улога на екстензори во зглобот на коленото. Оваа можност за промена на функцијата е од особена важност за постигнување на подобри спортски резултати, бидејќи се овозможува дејство со поголема мускулна сила. Потврда за оваа појава е насоката на тангенцијалната поткомпонента Т од компонентата М1 од мускулната сила М.
Прашањето поврзано со степените на слобода на движења во кинематичките синџири заслужува поголемо внимание, бидејќи придонесува за давање на појасни одговори во дефинирањето на сложените движења. Едно тело може да има максимум шест степени на слобода (три по оските и три околу оските од природниот координатен систем). Во едноосовинските зглбови има еден степен на слобода, во двоосовинските два степени и во триосовинските стри степени на слобода. Ако се земат предвид зглобовите на раката, каде зглобот на рамото е триосовински, зглбот на лакотот двоосовински и зглобот на шаката исто така двоосовински, тогаш вкупниот број на степени на слобода за раката третирана како полуотворен кинематички синџир изнесува седум (СС = 3+2+2 = 7). Овој пример е прикажан на слика 7, каде раката е претставена со три сегменти.

Имајќи го предвид големиот број на степени на слобода на движење кај периферните (дисталните) делови од полуотворениот кинематички синџир (пример шака како целина или прсти од шака), може да се објасни зошто човекот врши бескрајно голем број движења. Исто така, со тоа се објаснува и неможноста од идентично повторување на движењата, како и сложеноста на управувањето, контролата и регулацијата во локомоторниот систем од страна на централниот нервен систем.
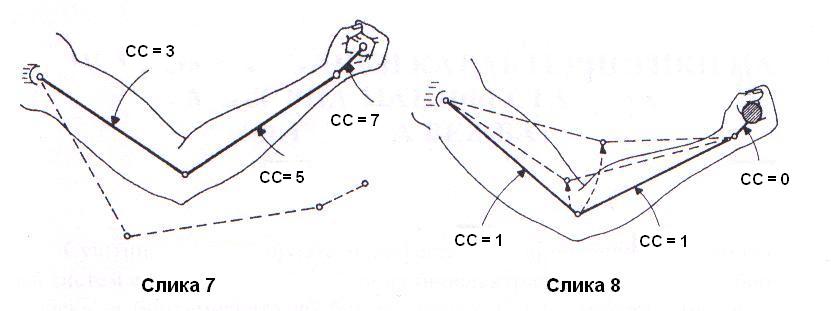
Кај природните и спортските движења кинематичките синџири најизменично се фиксираат и ослободуваат во зависност од целта, а со тоа и степените на слобода се менуваат. Имено, кога еден полуотворен кинематички сиџир се фиксира од двете негови страни, тогаш дел од своите степени на слобода на движење ги губи според СС = СС 6, каде што СС претставува збир на степени на слобода од поединечните членови (делови на телото) од кинематичката низа, односно синџир, пред неговото фиксирање. На слика 8 прикажан е пример на затворен кинематички синџир, каде степените на слобода со фиксирање на шаката се сведуваат само на еден (СС = 7-6 =1). Според тоа, надлактицата заедно со подлактицата можат да се движат истовремено во зглобот на рамото и зглобот на шаката во вид на кружен лак. Ако полуотоворениот кинематички синџир има помалку од шест степени на слобода на движење, тогаш по неговото фиксирање, односно премнинување во затворен кинематички синџир ги губи сите степени на слобода.